STREAM
Software Tool for Routing Efficiently Advanced Macrofluidics
The current fabrication and assembly of fluidic circuits for soft robots relies heavily on manual processes; as the complexity of fluidic circuits increases, manual assembly becomes increasingly arduous, error-prone, and time-consuming. We introduce a software tool that generates printable fluidic networks automatically. We provide a library of fluidic logic elements that are easily 3D printed from thermoplastic polyurethanes using Fused Deposition Modeling only. Our software tool and component library allow the development of arbitrary soft digital circuits. We demonstrate a variable frequency ring oscillator and a full adder. The simplicity of our approach using FDM printers only, democratizes fluidic circuit implementation beyond specialized laboratories.
Highlights
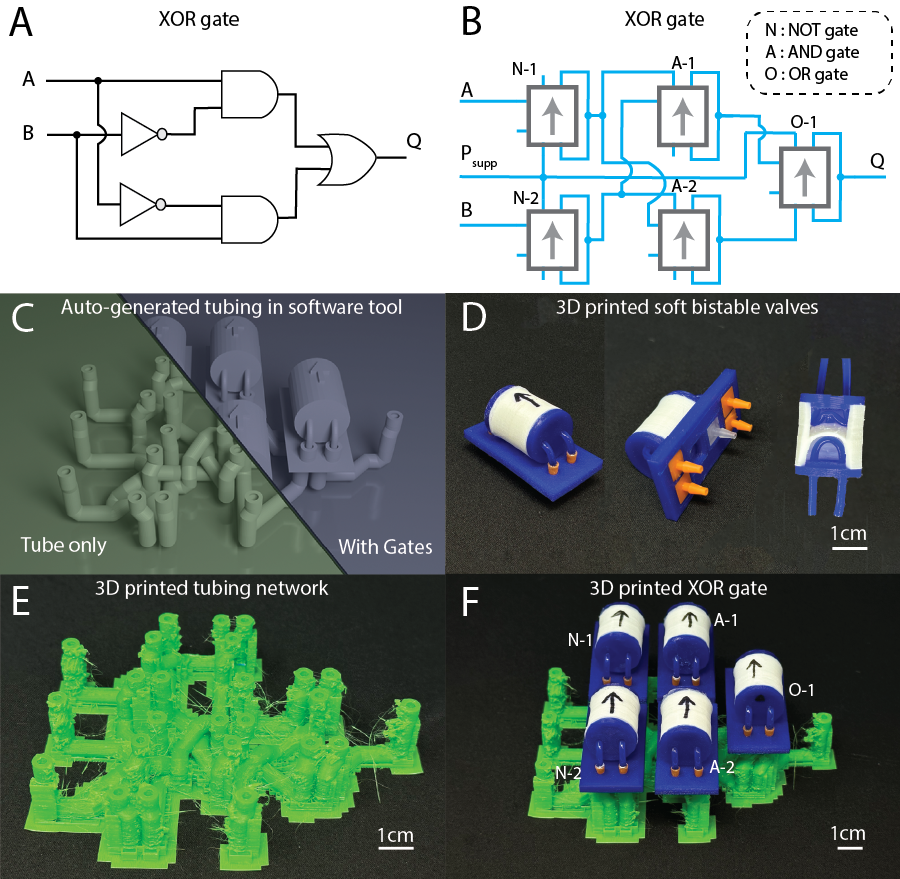
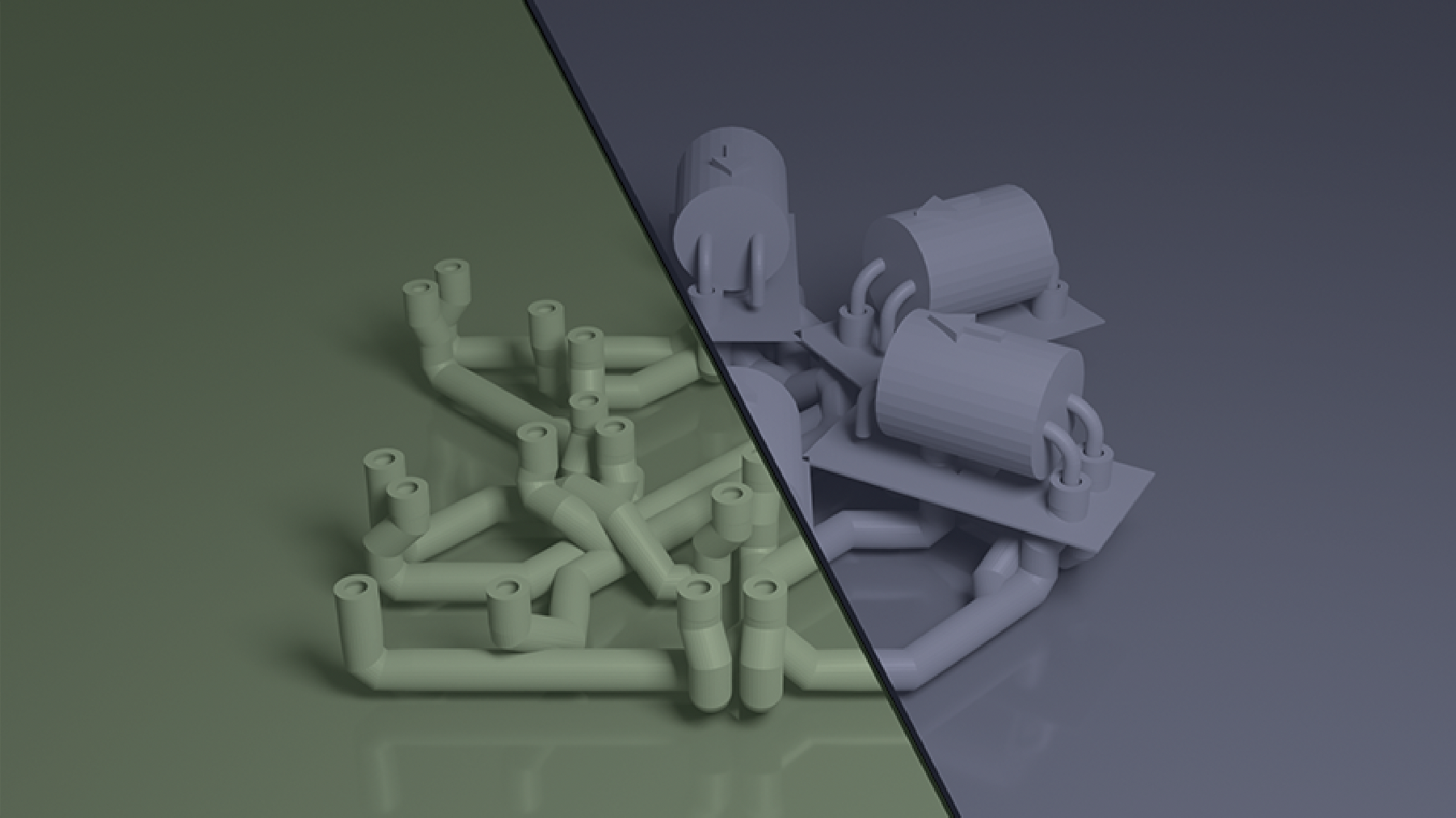
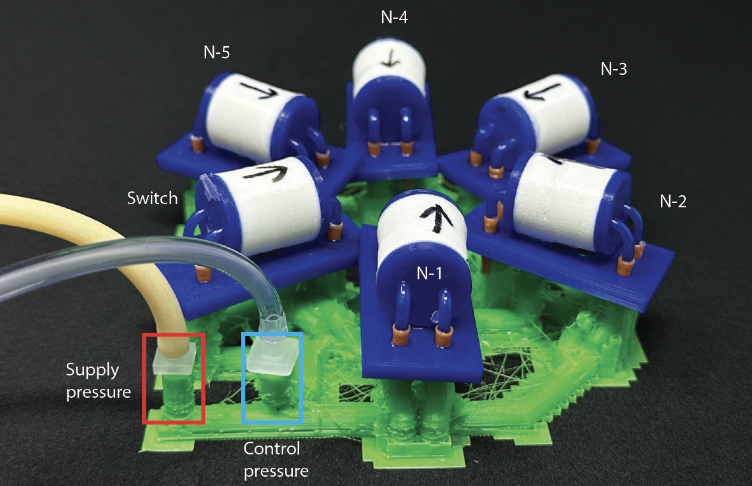
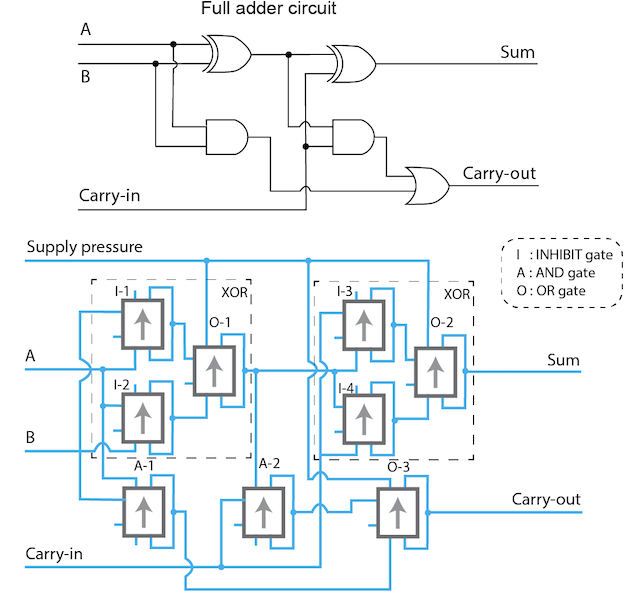
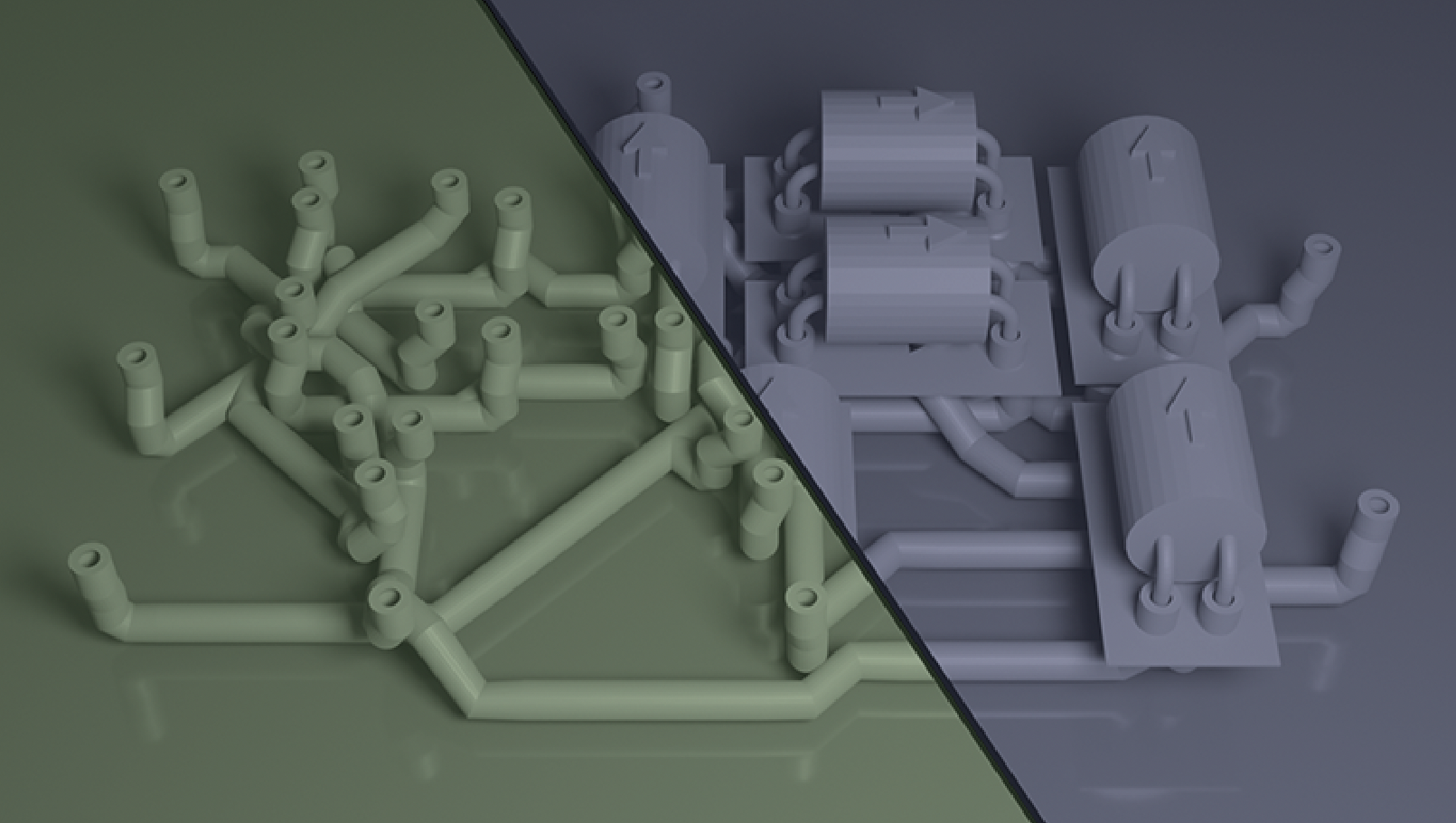
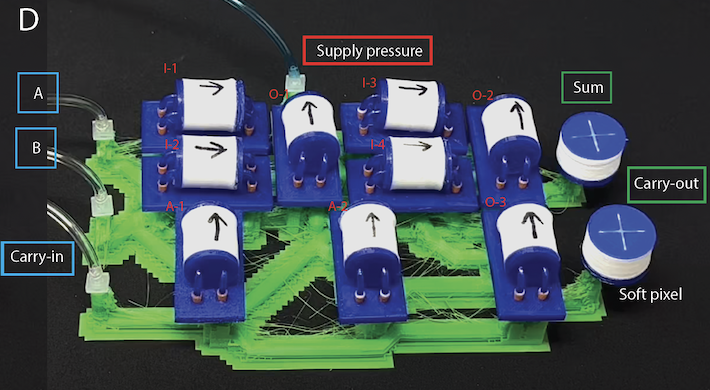
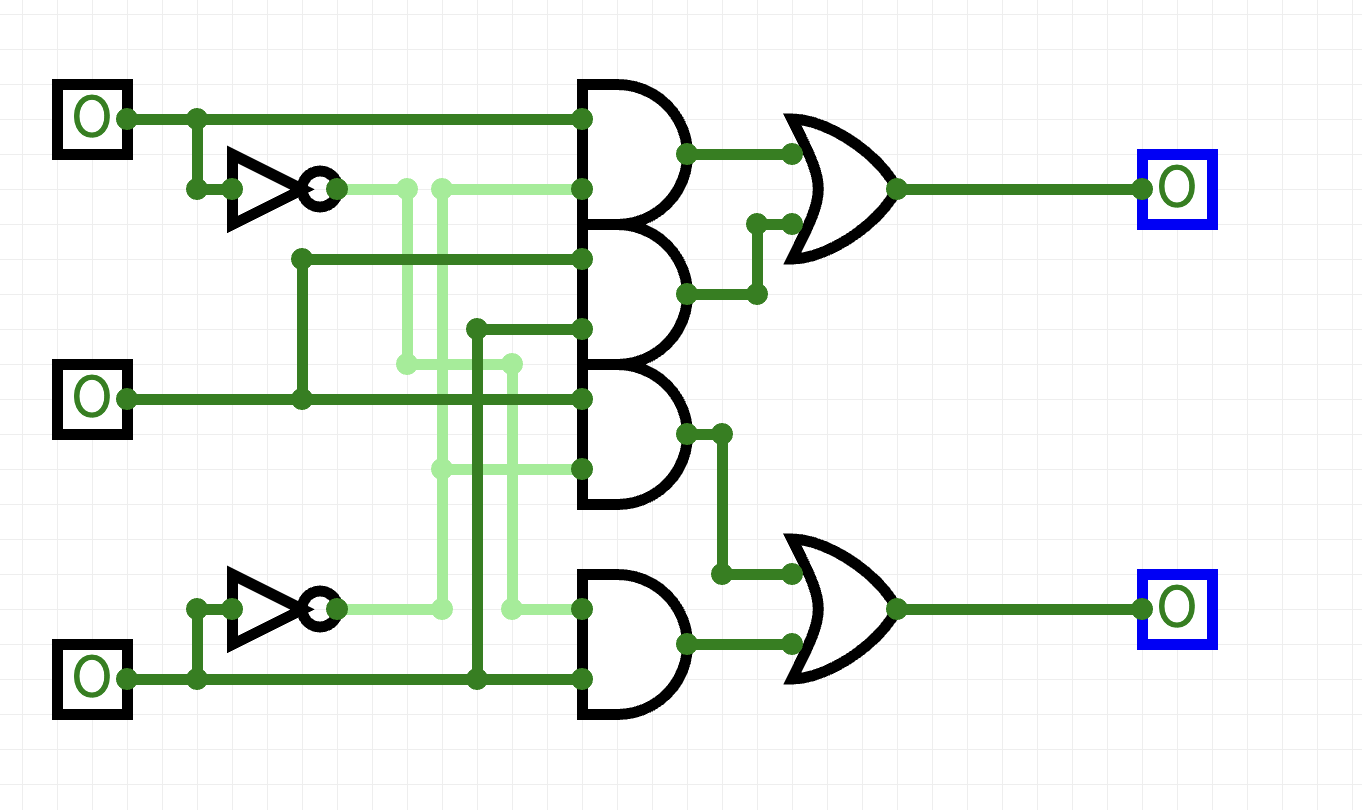
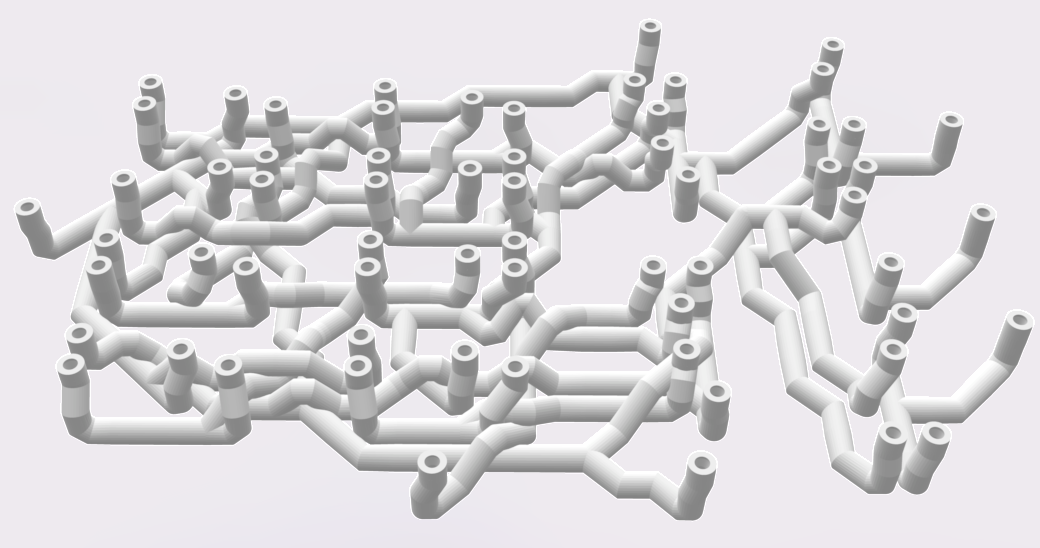
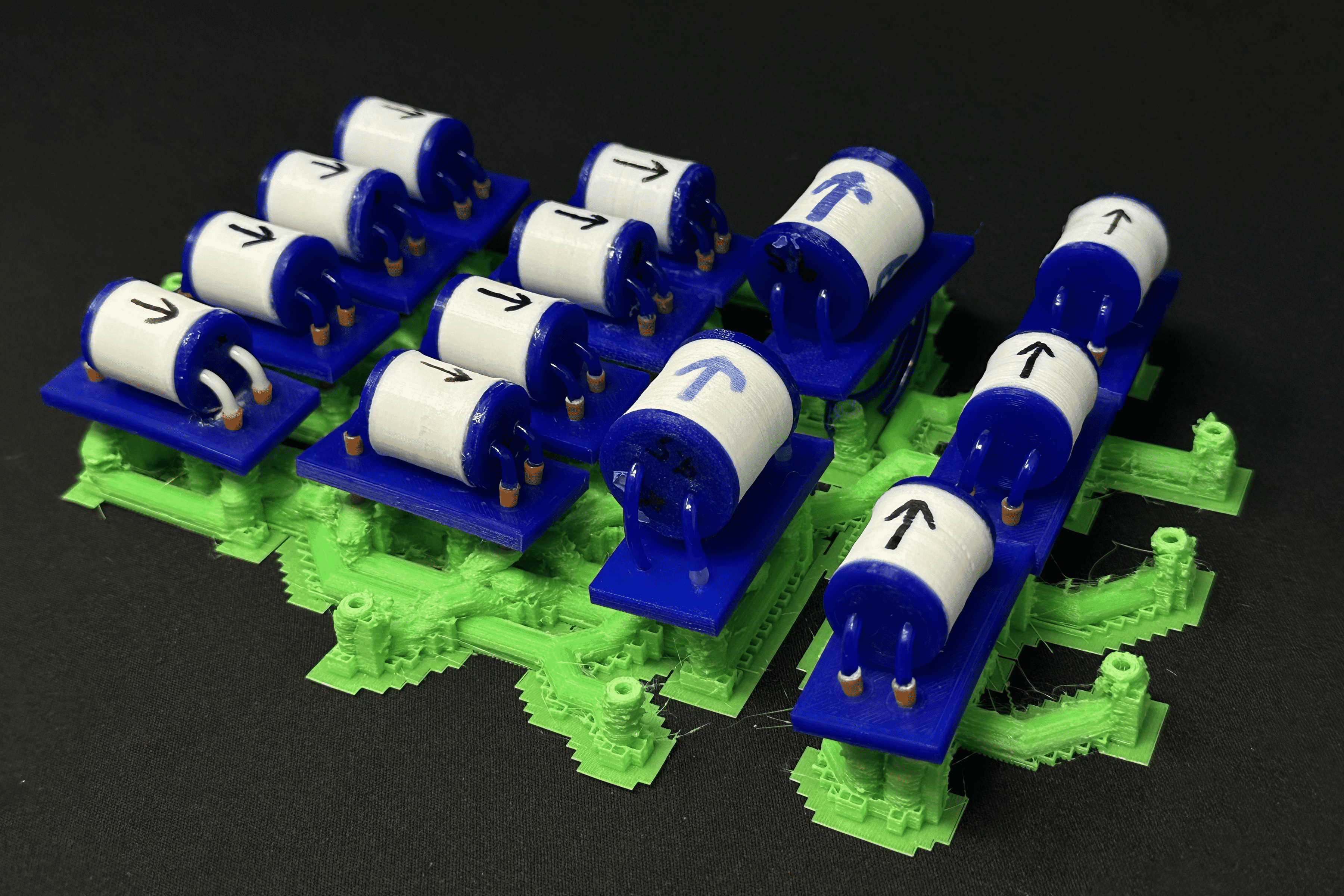
Process of fabricating fluidic circuit with our software. (A) logic diagram for the target circuit. (B) schematic for our printed valve implementation of the logic diagram. (C) rendered image of generated 3D models in our design software. The left half is shown without logic gates attached, the right half has logic gates attached. (D) 3D printed valve component. (E) 3D printed fluidic network. (F) assembled fluidic circuit.
Paper
Latest version: arXiv:2312.01130 [cs.RO] or here.
Code and Data

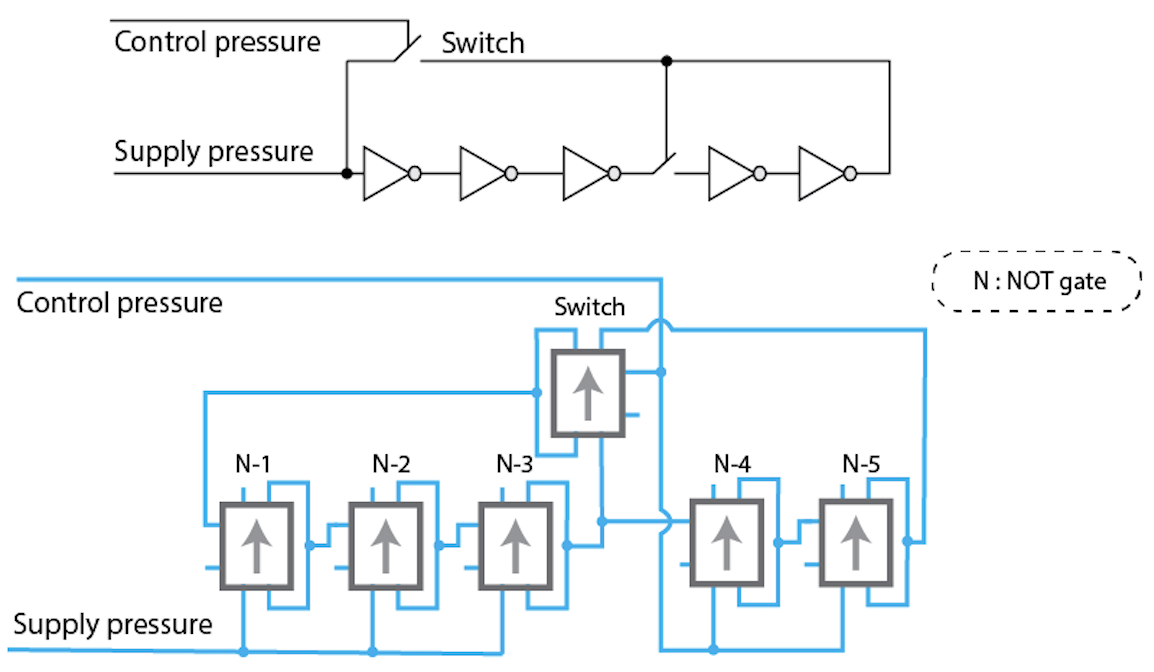
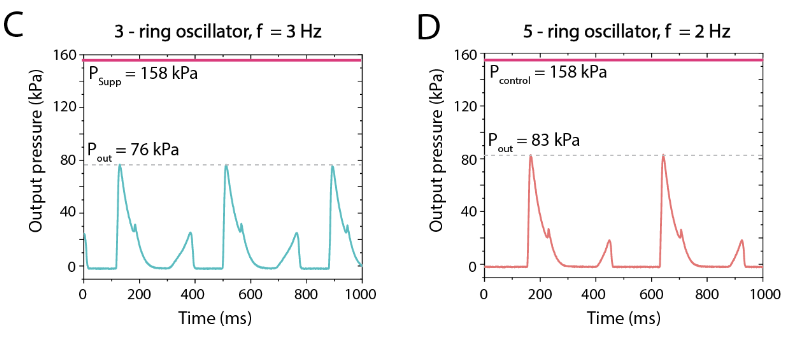
Ring Oscillator with Variable Frequency
This circuit could convert a constant supply pressure to a oscillation signal.
Another input can control manipulate the output signal frequency.
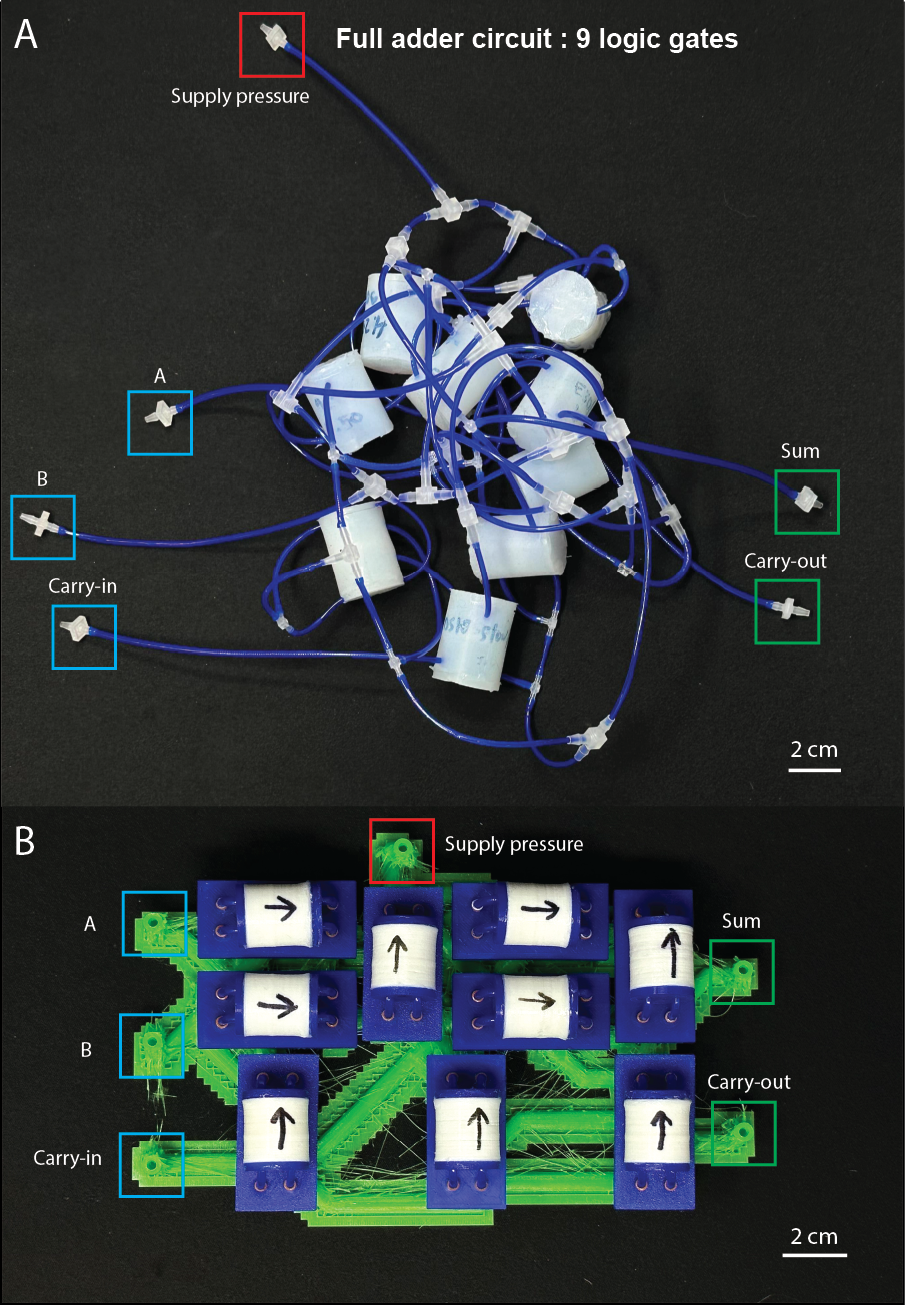
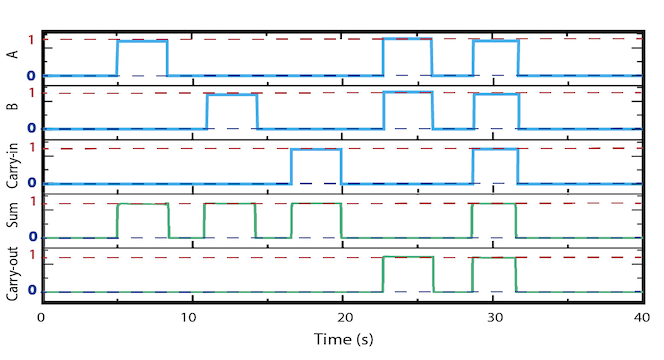
Full Adder
This circuit is a binary calculator that could add three binay numbers.
It is a fundamental digital circuit that performs arithmetic addition.
It takes in three inputs and has two outputs.
High pressure represents a "1" and atomic pressure represents a "0".
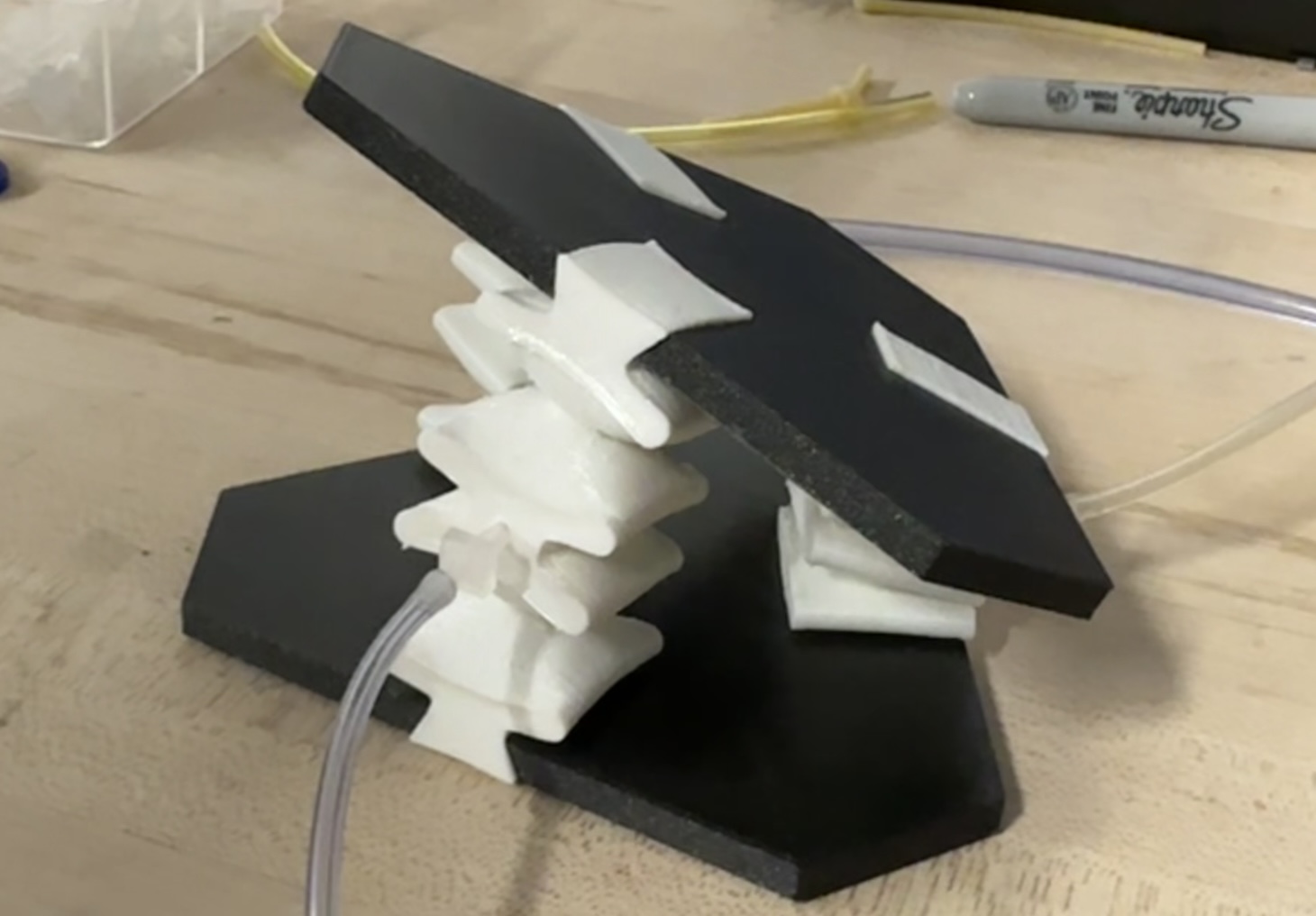
pneumatic Stewart Platform
This circuit enables a single input to controls the orientation of a pneumatic Stewart platform.
It is a four-state state machine consisting of input, output mapping and two-bit memory to store the states.
The concept of state machine is essential in robotics and enables the design of behaviors and their transition conditions.
This circuit is a proof of concept that this software could be essential in designing pneumatic robots with complex behaviors.
(This circuit is partically tested but not fully implemented.)
Video for the Paper
Acknowledgements
This work is supported by Robotics Materials Group at Worcester Polytechnic Instituite.
Contact
If you have any questions, please feel free to contact Lehong Wang